
无人船主要由水上无人船子系统和岸基监控子系统两个主要的系统组成。无人船控制系统主要由水上无人船子系统和岸基监控子系统两个主要的系统组成,其中水上无人船子系统又包括无人船载体机械架构、无人船下位机主控制中心、驱动控制中心、网络通信子系统、自主导航子系统、环境信息采集子系统、动力装置子系统和备用控制中心子系统。岸基监控子系统主要包括无人船控制中心和无人船视频监控中心。
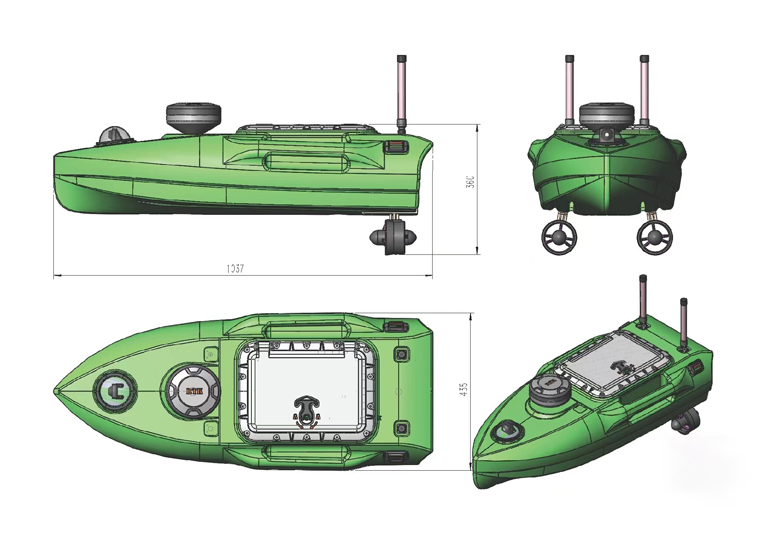
无人船船体

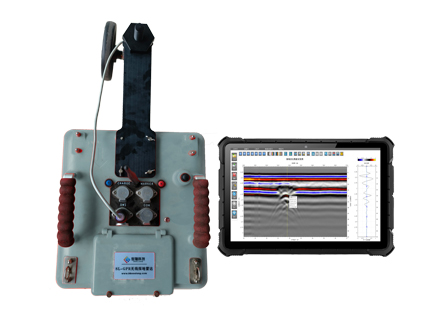
无人船岸基遥控系统
无人船集成了机器人智能控制技术、自动舵技术、远距离无线通讯技术、水面物标探测与目标自动识别技术、多传感器集成与数据整合技术等多种技术,实现了自主导航、智能避障、远距离通信、视频实时传输和网络化监控等功能
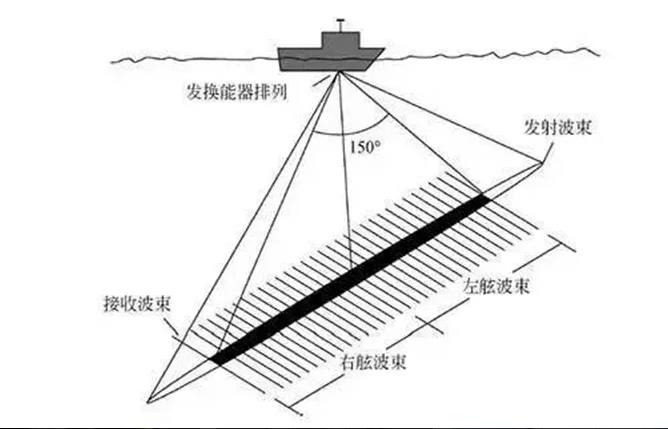
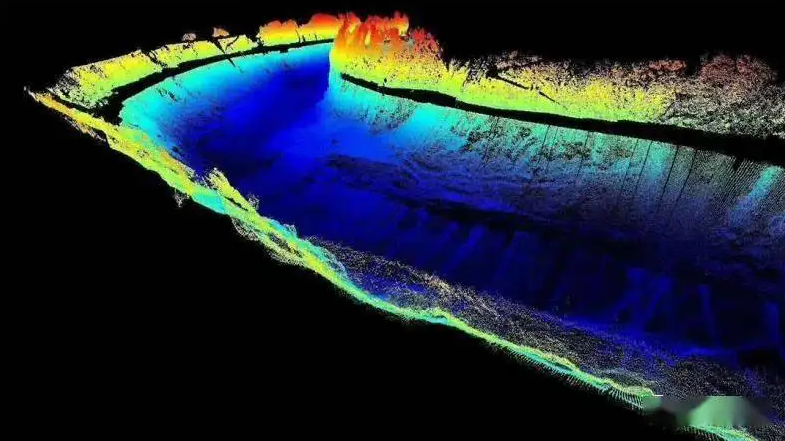
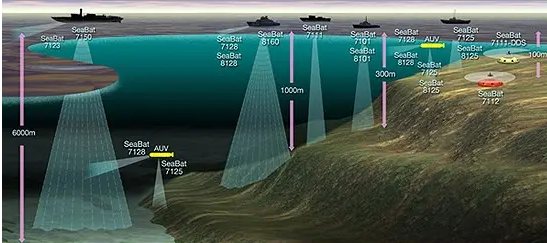
无人船水下测绘工作示意图
可根据需要灵活搭载GNSS接收机、测深仪(单波束/多波束)、侧扫声呐、ADCP、多参数水质监测仪、监控警报等多种传感器设备,可执行大范围水域的水文测量、水下地形/地貌测量、流速流量监测、无人巡逻及水质在线监测等多种功能。
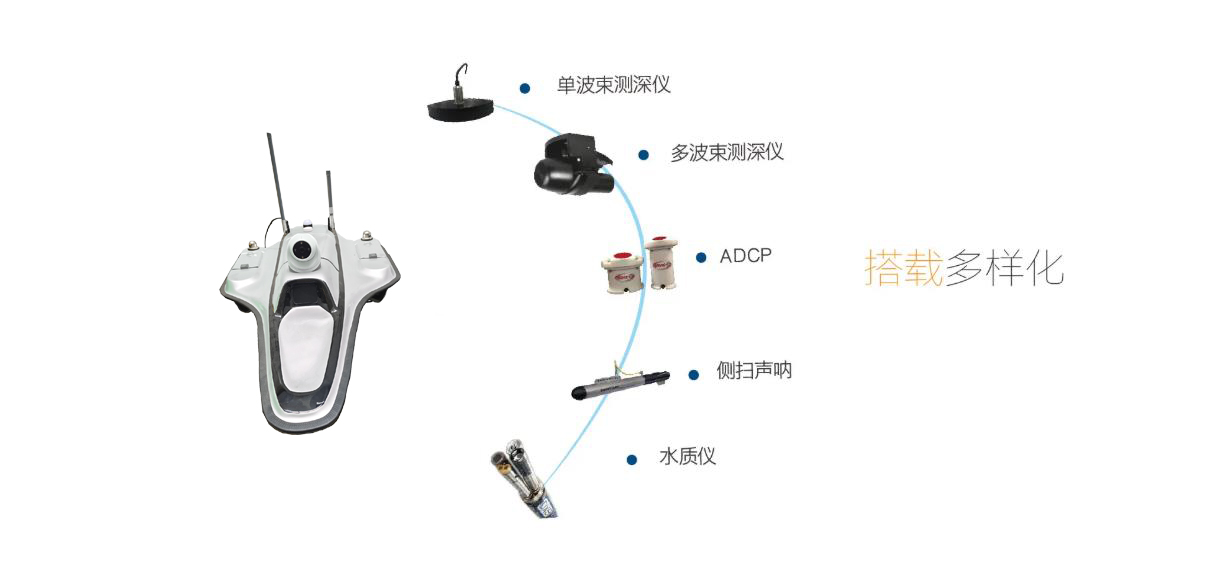
无人船可搭载设备
无人船目前主要应用于环保监测、科研勘探、水下测绘、搜索救援、安防巡逻乃至军事领域。